Die Klingen müssen für ein optimales Mähergebnis stets
in gutem Zustand sein. Um die Klingen solange wie
möglich scharf zu halten ist es wichtig, dass sich keine
Äste, kleinen Steine oder andere Gegenstände auf dem
Rasen befinden.
Tauschen Sie die Klingen für ein stets optimales
Mähergebnis regelmäßig aus. Siehe
Austausch der
Messer auf Seite 39
.
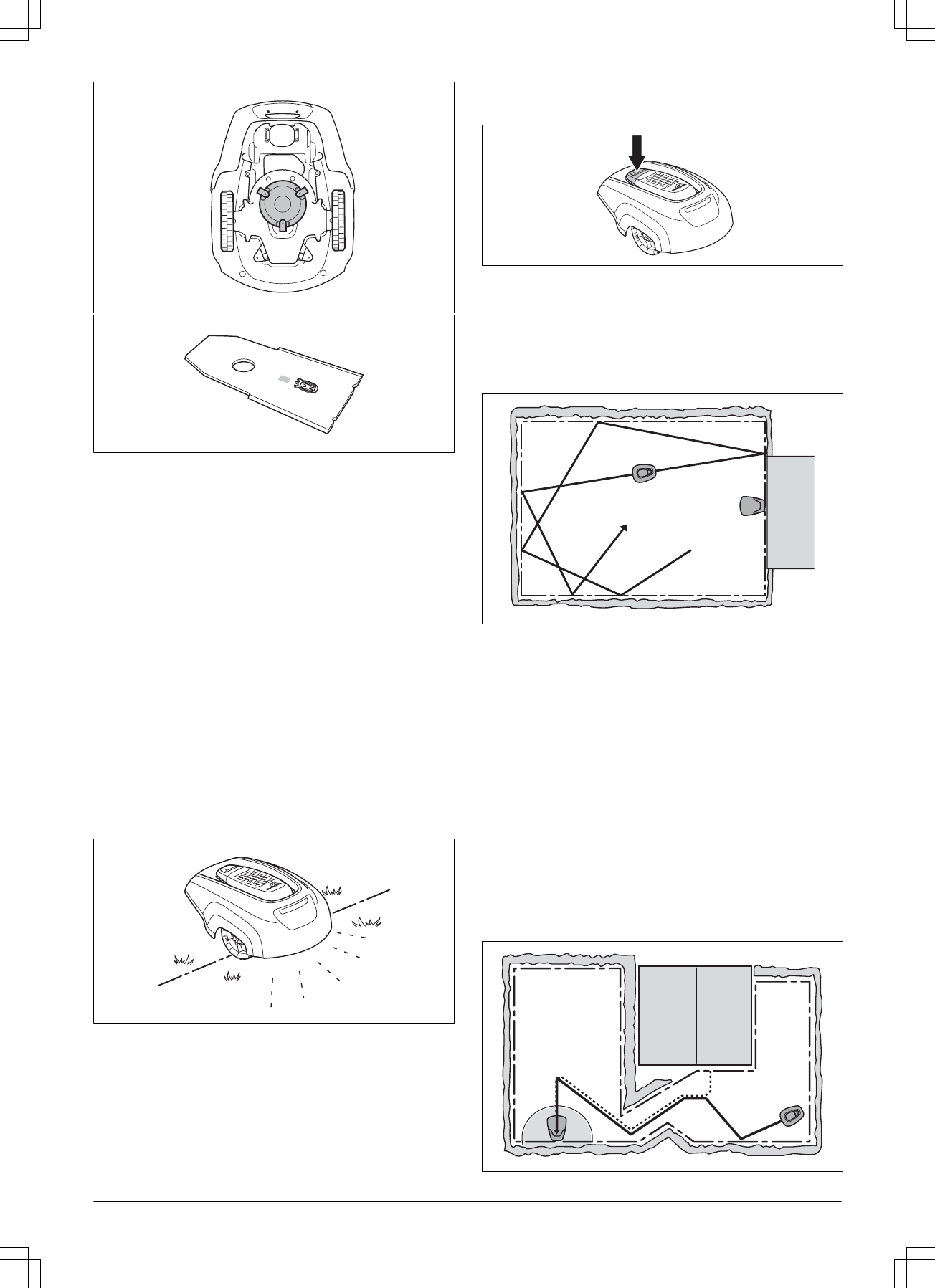
1.2.3 Arbeitsmethode
Der Mähroboter mäht den Rasen automatisch. Die
Mähphasen wechseln sich ständig mit Ladephasen ab.
Wenn der Mähroboter auf ein Hindernis stößt oder sich
dem Begrenzungskabel nähert, dreht er um und schlägt
eine neue Richtung ein. Mittels Sensoren vorne und
hinten erkennt der Mähroboter, wann er sich dem
Begrenzungskabel nähert. Die Vorderseite des
Mähroboters ragt vor dem Drehen des Mähroboters
immer etwas über das Begrenzungskabel hinaus. Der
Abstand kann geändert werden, um der Installation falls
erforderlich angepasst zu werden.
Die STOP-Taste oben auf dem Mähroboter dient
hauptsächlich dazu, den Mähroboter anzuhalten, wenn
er in Betrieb ist. Wenn die STOP-Taste gedrückt wird,
öffnet sich die Abdeckung, unter der sich das Bedienfeld
befindet. Über die Bedientafel verwalten Sie alle
Einstellungen des Mähroboters. Die STOP-Taste bleibt
eingerastet, bis die Abdeckung wieder geschlossen
wird. Dies dient zusammen mit der START-Taste als
Startsperre.
1.2.4 Bewegungsmuster
Das Bewegungsmuster des Mähroboters erfolgt nach
dem Zufallsprinzip, was bedeutet, dass ein
Bewegungsmuster nie wiederholt wird. Mit diesem
Mähsystem wird der Rasen vom Mähroboter
gleichmäßig und ohne Spuren gemäht.
1.2.5 Suchmethode
Das Suchkabel ist ein Kabel, das von der Ladestation
aus zu einem entlegenen Teil des Arbeitsbereichs oder
durch eine schmale Passage verlegt wird. Es ist mit dem
Begrenzungskabel verbunden, sodass der Mähroboter
die Ladestation viel einfacher und schneller auffinden
kann. Weitere Informationen finden Sie unter
Installation
des Suchkabels auf Seite 19
.
Der Mähroboter beginnt nach der Ladestation zu
suchen, wenn die Akkuladung zu schwach wird. Der
Mähroboter mäht nicht, während er nach der
Ladestation sucht.
Wenn der Mähroboter nach der Ladestation sucht, wird
zunächst nach dem Suchkabel gesucht. Anschließend
folgt er dem Suchkabel zur Ladestation, wendet direkt
vor der Ladestation und fährt rückwärts hinein.
4 - Einleitung 358 - 001 - 21.09.2017