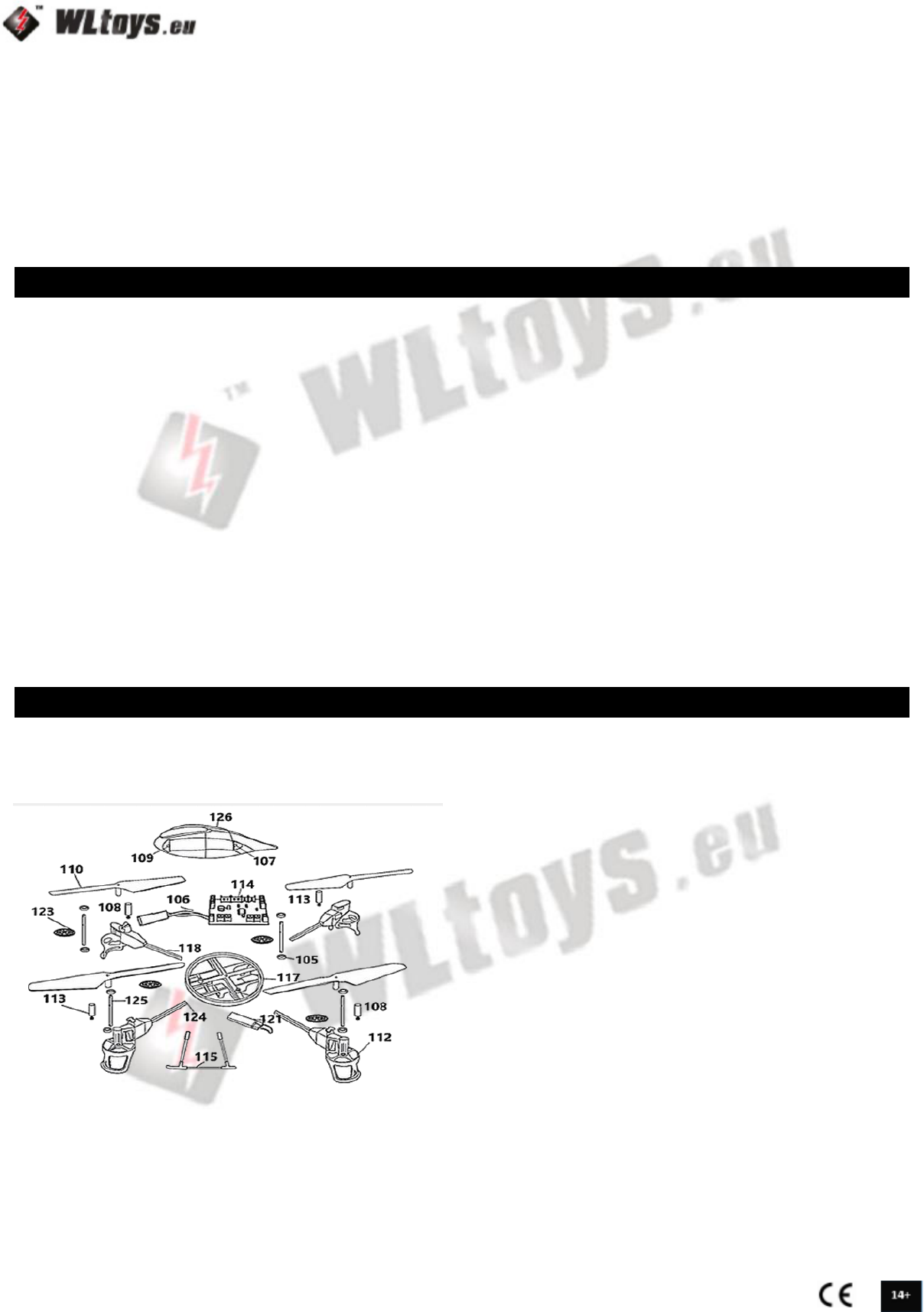
Ref | Description | Quant
406 | Main frame | 1
407 | PCB | 1
409 | Bottem frame | 1
410 | Gear | 4
411 | Arm A | 2
412 | Arm B | 2
414 | Rubber leg | 4
415 | Blade | 4
416 | Gear axle | 4
417 | Bearing | 8
418 | Motor metal gear | 4
419 | Motor clockwise | 2
420 | Motor counterclockwise | 2
421 | Battery | 1
422 | Protect part | 4
423 | Canopy upper | 1
426 | Plug part | 1
427 | Screwdriver | 1
428 | EVA spacer | 4
429 | Charger | 1
The copter is not sensitive to crashes, but in case of extreme drops it is possible that some parts may break. All parts can be
ordered and easily assembled. Please contact your dealer or visit www.wltoys.eu for more information.
If the copter is unstable, resulting in frenetic flying in all directions, and rotates around its axis so that you have to constantly
correct its flight, then the gyroscope is probably not calibrated properly. To perform recalibration, connect the drone to the
transmitter (part Activation in the manual), then click on 100% button of the remote and move both sticks to the bottom left. When
the calibration is performed, you will either hear a long beep or see flashing lights (on the PCB) or both.
Note: The calibration is done in the factory, it is usually not necessary to do it when you receive the product.
1. The receiver LED blinks continuously for more than 4 seconds after the quadcopter battery have been inserted. No response to
the command input. The transmitter is not connected to the device. Repeat the power-on initialization process.
2. No response from the quadcopter after the battery have been connected. There is probably contact failure on the battery
terminals. Turn on the transmitter and ensure that the battery of the vehicle is correctly inserted. Replace the battery and ensure
good contact at the battery's connections. Use fully charged batteries in the remote.
3. The motor does not respond to the throttle stick and the receiver flashes. The quadcopter's battery is exhausted. Charge the
battery or replace it with a charged battery.
4. The main rotor continues to rotate after landing. Confirm that the gear lever is oriented downward.
5. The main rotor rotates but the device does not take off. The blades may be distorted or the quadcopter battery is exhausted.
Charge or replace with a fully charged battery and / or replace the blades.
6. The quadcopter suffers of strong vibrations. The blades are distorted. Replace the blades.
7. The tail is not balanced after adjusting the clip or speed is inconsistent in the left / right pirouette. Tail rotors are probably
damaged. Replace the main wing and / or the main engine.
8. The quadcopter was still moving forward after the adjustment of the levers during hover. The gyroscope is not correctly
calibrated. The gear lever is placed too high or too low. The boot refines the calibration therefore restart on a flat surface.
9. You can not fly, the helicopter falls. The motor is probably fall out or the gears are loose. Reinstall the motor and tighten the
gears.