Order Numbers
F4090 - F4091 - F4092
F4095 - F4096 - F4097
Special feature:types H-2,HR-3 and H-4
The mixing of the swashplate functions makes it necessary to
reverse the mixed channels.The overall travel produced by mixing
the signals may also produce excessive movements,and the swash-
plate may jam as a result.
The software provides an answer to these problems: if you select
one of the swashplate types listed above, Setup menus appear
when you press the "S" button.
At this point you can set the travel of
the corresponding control functions
to maximum by turning the 3-D hot-
key. (Control travel adjustment of the
mixed functions.)
Turning the hotkey to the left generates a Rate with a negative pre-
fix,which means that the function is reversed.
The first step is to use the REVR menu to reverse the direction of
servo rotation as required; the aim is that all the servos run in the
same direction when you operate the collective pitch control.
Once this is achieved, you should set the correct direction of run-
ning of the mixed swashplate functions using servo reverse and
transmitter control travel rate adjustment; this is carried out in the
SWSH menu.
At this stage set the maximum possible swashplate travel.
10.4 Revolution mixer (REVO)
This function is designed to compen-
sate for torque changes in the main
rotor due to changes in the throttle or
collective pitch setting, using an elec-
tronic compensation mixer involving
the tail rotor.
Setting up this function accurately makes the work of a tail rotor
gyro system much easier. On the other hand, an incorrectly
adjusted Revo-Mix may even counteract the function of the gyro.
For this reason it is very important to set up this mixer carefully.
It has to be admitted that the inexperienced pilot does not find it
easy to control a model helicopter without a gyro,in order to adjust
the Revo mixer value accurately.
Modern gyro systems with piezo sensors are relatively sensitive,
and do not necessarily require a perfect Revo-Mix setting; in this
case it is perfectly feasible to fly the model with the guideline value
of 25%.
Modern SMM gyros with semi-conductor sensors (e.g. robbe-Fut-
aba GY 401 gyro) do not necessarily require more than a small
amount of Revo-Mix support - if at all - particularly if you are an
advanced pilot; in this case the Revo-Mix function can simply be
switched off.
Special case:
If a piezo or SMM gyro is operated in Heading-Hold / AVCS
mode,the Revo-Mix function must always be switched off.
The software provides a Revo-Mix set-
ting which remains constant in all
flight modes. See the flight mode
table on this page.
- Move to the Select menu REVO and press the 3-D hotkey to
move to the Setup menu.
- The "SET" and "%" displays flash.Rotate the 3-D hotkey to set the
guide value of 25%.
- Press the "S" button,and the "INH" display flashes.Switch the
mixer on by turning the 3-D hotkey to the left.
The direction of rotation of the main rotor must be taken into
account when you are setting the percentage value.If you increase
collective pitch on a right-hand rotation main rotor,the pitch of the
tail rotor must also be increased - assuming that it rotates in the
same direction. With a left-hand rotation main rotor the exact
opposite is true.
(-) negative prefix = left-hand rotation main rotor
(+) negative prefix = right-hand rotation main rotor
It is generally necessary to carry out a series of test-flights in order
to find the optimum set-up for the Revolution mixer.
Please note that the model should already be well trimmed, i.e. it
should require no control commands to stay in a stable hover.
If you connect a mix trimmer to socket 4,the REVO mixer value can
be altered while the model is in flight.
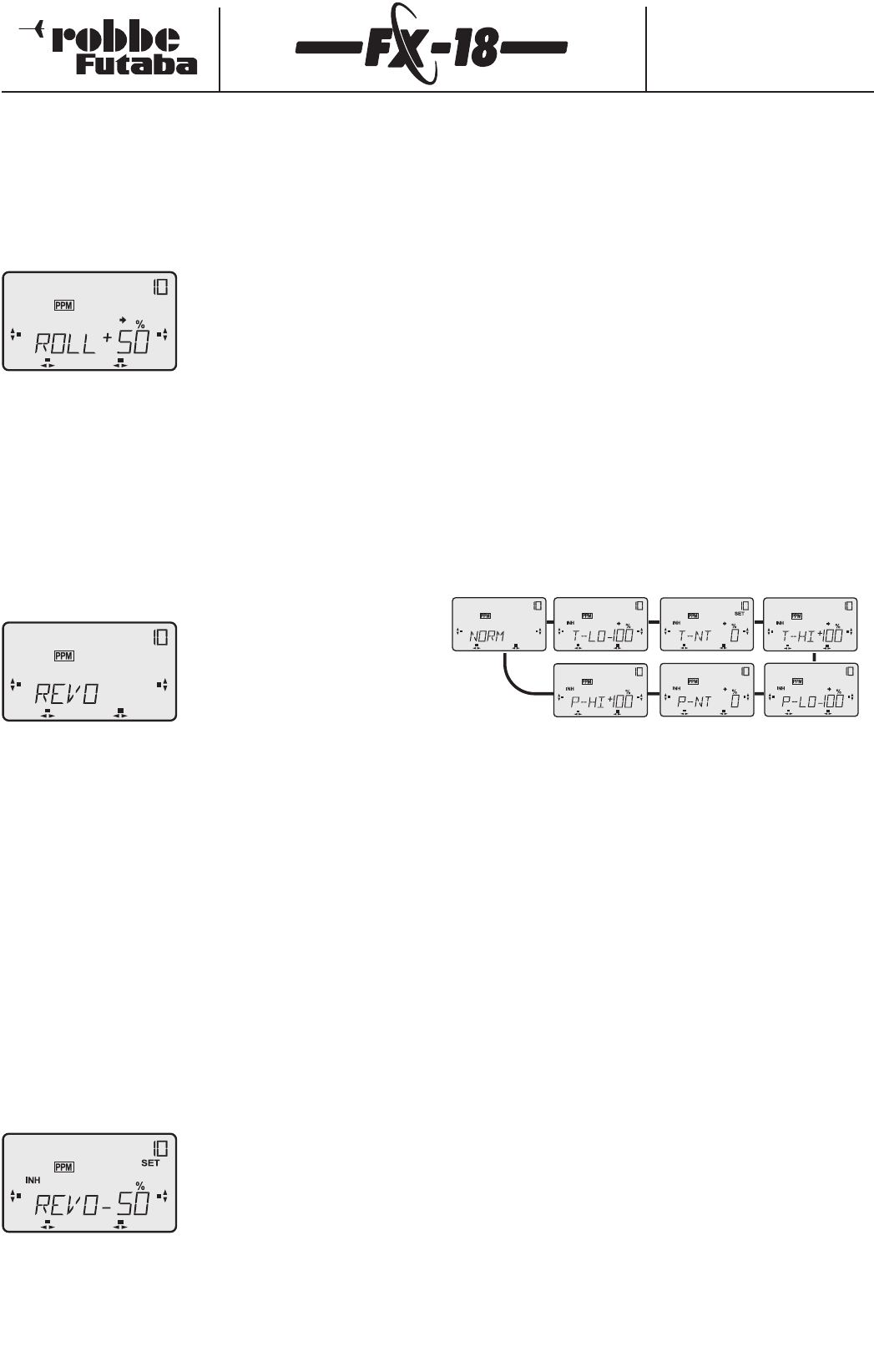
10.5 Idle-up Normal (NORM)
The software of the FX-18 transmitter offers a total of four different
flight mode mixers:
Normal setting (NORM);Idle-up 1 (IDL-1),Idle-up 2 (IDL-2) and auto-
rotation (AURO).
In the Normal menu you carry out all the adjustments for throttle
and collective pitch, as they are needed for starting and stopping
the motor,and for lifting the helicopter off at the start of a flight.
It is usually possible to leave the settings for throttle and collective
pitch as they are,as these values are used as the base setting for the
throttle and collective pitch travels, i.e. they represent maximum
values.
Note that the collective pitch travel should also be set to the maxi-
mum value in the SWSH menu if you select an appropriate swash-
plate type (H-2,HR-3,H-4).
At maximum collective pitch travel the helicopter’s collective pitch
angle should be around +12°;at stick centre the pitch angle should
be around +4°,and at minimum collective pitch a blade angle of -5º
is correct.
The carburettor linkage should be adjusted so that the throttle bar-
rel is completely open at the full-throttle position.At the stick cen-
tre position it should be around 60% open,and at the idle position
the aim is a reliable idle.
The settings can then be fine-tuned using the percentage adjust-
ment facility in the sub-menus:
- Move to the Select menu NORM,and press the 3-D hotkey to
move to the Setup menu.
- The Setup menu for the throttle idle point now appears.The fol
lowing Setup menus appear if you subsequently press the "S"
button:
42