P.15
A main feature of the Robosapien is that he can be
programmed in segments. The 14 step Master Program can
"link in" any 6-step Sensor Program for long play routines.
• Master Programs:
a) Ensure the Controller is in the Red Command
mode (indicator light on the Controller is DARK).
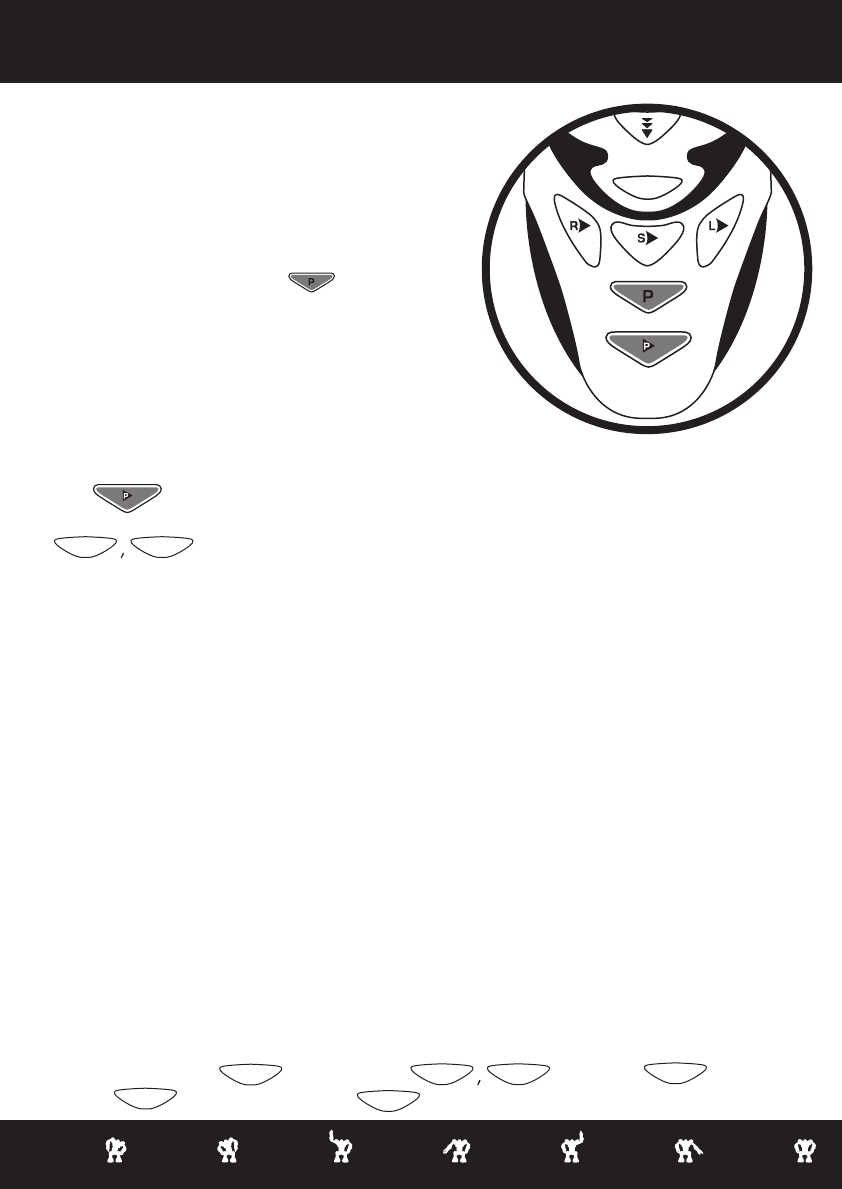
b) Press the MASTER PROGRAM ( ) button once;
Robosapien says "Beep". You are now in program entry
mode.
c) Program up to fourteen steps (the SELECT button does not
count as a step - see Touch Sensors page 13 for
example).
d) After 14 steps, the Robosapien will automatically execute
your Master Program sequence.
e) If you wish to program less than fourteen steps, you need to 'close' the program by pressing PROGRAM
PLAY ( ).
- for example:Walk Forward, Turn Right, Walk Forward, Turn Left, Walk Backward,
( ) High 5, Program Play.
f) To execute your program at any time, press PROGRAM PLAY.
g) To execute your program without linking in the sensor programs (so you can quickly review your Master
Program sequence), press SELECT, then MASTER PROGRAM.
• Clearing the Program/ Holding the Program:
a) To clear the Master Program, press the MASTER PROGRAM button once, then press the PROGRAM
PLAY Button. The robot goes "OUAH!" to confirm the program is cleared.
b) Turning Robosapien off will also erase any Master Programs.
c) If you wish to keep your program, use the Sleep function (SELECT-SLEEP) to hold the program in
Robosapien's memory for up to two hours.
• Extending the Program:
a) You can extend the length of the Master Command Program beyond fourteen steps by "linking in" any
of the three Sensor Programs. Sensor Programs can be mixed and matched in any pattern.
b) First pre-program any Sensor Program with a routine (see previous pages 13 & 14).
c) Press Master Program to enter your program as normal. Press SELECT then press any R>, S>, or L>
buttons. This sensor routine will be stored as ONE STEP in your master program. Repeat to add
additional sensor routines. On playback, those routines will play with no pause between execution.
d) To enter a Master Program so that the robot waits for each sensor input, enter your program as normal
then just press either R>, S>, or L> as one step. On playback, the robot will STOP at the beginning of
each sensor routine waiting for either a sensor touch or sound. For example: WALK FORWARD,
WALK BACKWARD, ( - R>), R>, ( - STOP), ( - L>), L>,
STOP, ( - S>), LEFT ARM UP, ( - S>), S>, S>, PROGRAM PLAY.
Programming Mode - master command